MANUBOT-BRAZO ROBÓTICO
A downloadable project
Brazo Robótico Didáctico 🤖
(LEGO® SPIKE™ Prime)
Centro: Colegio María Inmaculada (Carcaixent)
Equipo: TechnoMakers
Participantes: Daniela Estarlich (Portavoz) • Sonia Stepanyan • Ginebra Santamaría • Elena Alberola • Zhi Xin Zhou • Antoni Signes • Darío García • Lucas Salom • Aaron Martorell • Hugo Ferrús.
📝Resumen del proyecto
El objetivo del proyecto es construir un prototipo educativo de asistencia robótica con LEGO® SPIKE™ Prime, orientado a apoyar tareas de agarre y movimiento del brazo en personas con movilidad reducida.
El sistema se ha elaborado como un exoesqueleto asistido modular con dos configuraciones: una para la mano (agarre/rotación) y otra para el brazo (empuje/soporte).
🏗️Arquitectura del sistema
El prototipo se divide en dos módulos con doble configuración (2 hubs, 2 programaciones):
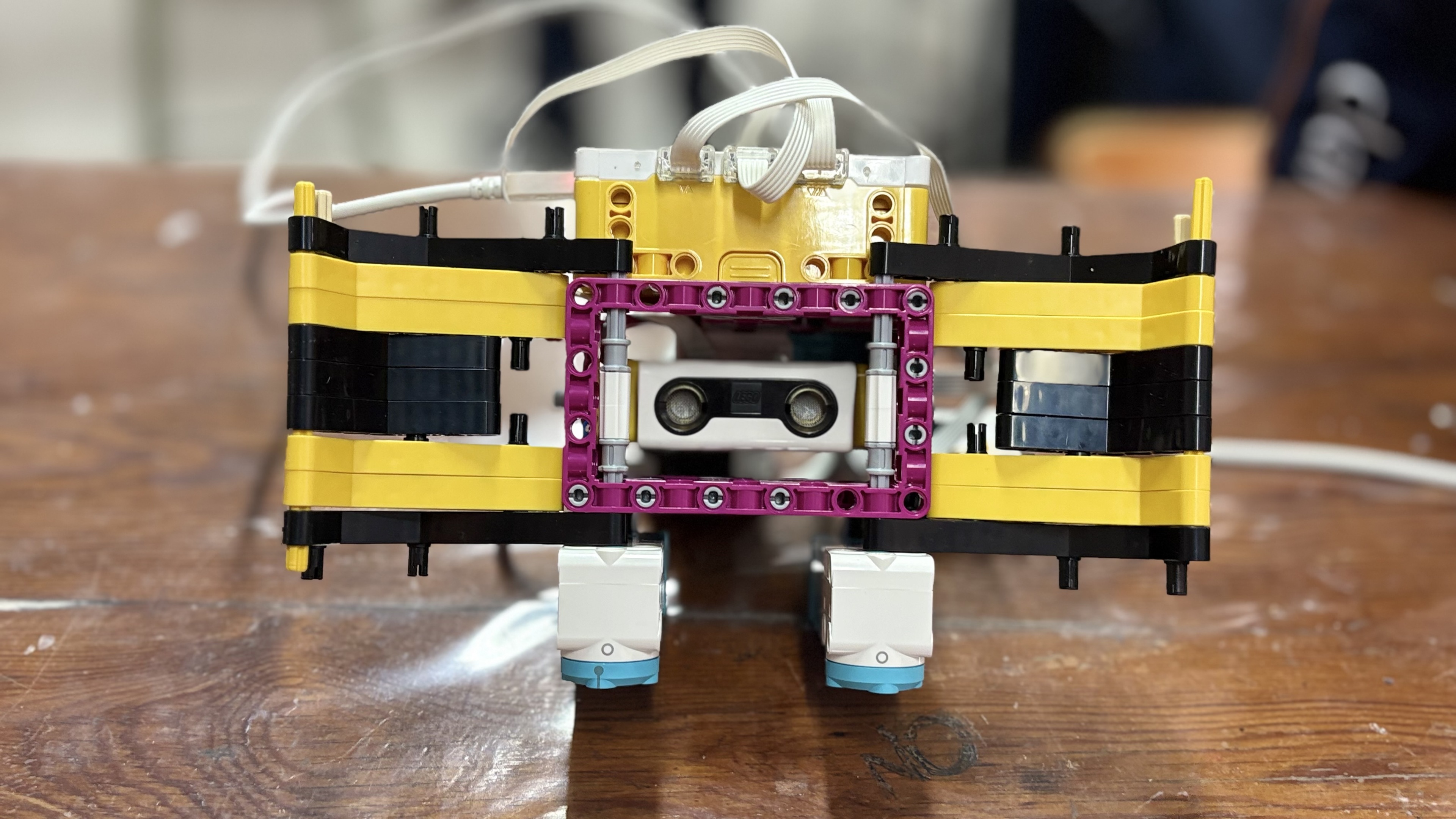
- Módulo A — Exoesqueleto de mano (agarre asistido):
Ayuda a coger, soltar y maniobrar objetos con una pinza accionada por motores, con sensorización de proximidad/presión y rotación ±45° del efector final.
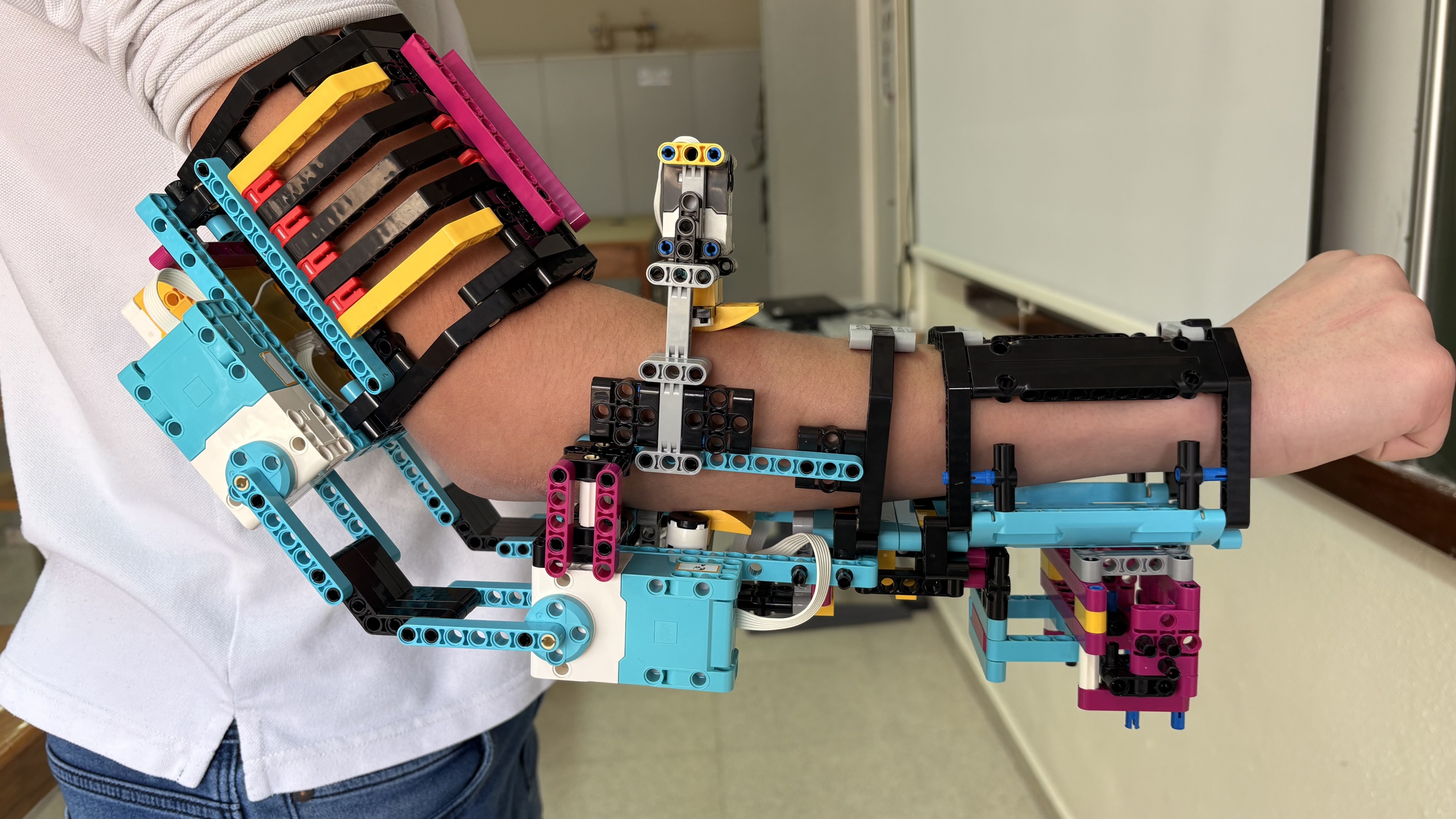
- Módulo B — Exoesqueleto de brazo (asistencia al movimiento):
Ofrece empuje/soporte para subir, bajar o mantener el brazo cuando existe limitación de fuerza.
🧩Diseño y componentes
Componentes principales:
| COMPONENTES | CANTIDAD | FUNCIÓN |
| Estructura | Módulos LEGO SPIKE Prime | Acoplamientos anatómicos para antebrazo y mano (soporte ergonómico) |
| Hubs | 2 | Control |
| Motores | 5 | Potencia |
| Sensor de distancia | 1 | Percepción |
| Sensores de presión/fuerza | 4 | Pulsador |
| Control | Prioridad manual sobre automatismos |
|
⚠️Notas de seguridad aplicadas al diseño:
- detección de bloqueo activada en los motores de la pinza para evitar accidentes;
- paradas de emergencia vía pulsadores;
- prioridad de orden manual sobre automatismos, ante una emergencia, el sensor de presión conectado al puerto D del módulo A (exoesqueleto de mano) siempre hace que las pinzas se abran rápidamente.
🔧Usos y modos de operación
Agarre asistido del exoesqueleto de mano (Módulo A):
- La pinza se cierra por proximidad al objeto.
- El control manual de apertura mediante sensor de presión siempre prevalece.
- Parada por bloqueo/caída de velocidad para proteger la mecánica, puede abrirse al instante con el pulsador.
- También se puede hacer girar la parte de la pinza 45º en ambas direcciones para mayor manipulación de objetos.
Movimiento del brazo en el exoesqueleto del brazo (Módulo B):
- Empuje controlado para subida/bajada con parada inmediata al soltar.
- Sensores de presión integrado en el brazo que detectan cuando el usuario quiere subir o bajar el brazo: puerto A (subida) y puerto B (bajada).
- Los sensores activan respectivamente los motores del brazo para reducir el esfuerzo al levantar ciertos objetos.
🔌Mapa de puertos
- Hub — Módulo A (mano):
Puerto | Dispositivo | Función |
D | Sensor de presión (pulsador) | Apertura prioritaria de la pinza |
E | Sensor de presión (pulsador) | Pulsar para hacer girar en una dirección la pinza y pulsar con fuerza para cambiar de dirección. |
C | Sensor de distancia | Detecta cuando un objeto se sitúa entre las pinzas y envía señales a los motores A y B para cerrarlas. |
A y B | Motores pinza/rotación | Cerrado de la pinza al recibir señal del sensor de distancia y apertura ante orden de pulsador D. |
F | Motor de rotación de la pinza | Rotación de la pinza. |
- Hub — Módulo B (brazo):
Puerto | Dispositivo | Función |
A | Sensor de presión | Orden de subida |
B | Sensor de presión | Orden de bajada |
C | Motor | Rotación de subida y bajada respectivamente. |
D | Motor | Rotación de subida y bajada respectivamente. |
🧠Lógica de control
- Módulo A — Pinza (prioridad manual)
Lógica del agarre (Módulo A): 🧠
• Prioridad manual (seguridad): si el botón del puerto D está pulsado, la pinza se abre mientras dure la pulsación.
• Cierre por proximidad: si el botón no está pulsado y distancia de un objeto entre las pinzas < 5 cm, la pinza se cierra automáticamente.
• Protección mecánica: el cierre se detiene al detectar contacto o caída de velocidad.
• Orientación del efector: rotación ±45° para facilitar la manipulación.
Pseudocódigo:
SI (botón D = pulsado) ENTONCES
Abrir pinza (mientras el botón D esté pulsado)
SINO
SI (distancia < 5 cm) ENTONCES
Cerrar pinza
FIN SI
FIN SI
Detener al contacto (bloqueo/caída de velocidad)
SI (botón E = pulsado con fuerza) ENTONCES
Rotar pinza en una dirección (mientras el botón D esté pulsado)
SINO
SI (botón E = pulsado sin tanta fuerza) ENTONCES
Rotar pinza en la otra dirección
FIN SI
FIN SI
- Módulo B — Asistencia al brazo
Lógica de asistencia (Módulo B): 🧠
• Control por pulsación mantenida.
• Subida: mientras el sensor A esté presionado (por presión ejercida al intentar levantar el brazo), el motor ayuda a elevar el brazo.
• Bajada: mientras el sensor B esté presionado (por presión ejercida al intentar bajar el brazo), el motor ayuda a descender el brazo.
• Seguridad: parada inmediata al soltar o ante bloqueo.
Pseudocódigo:
MIENTRAS (sensor A presionado) → Subir (motores activos)
MIENTRAS (sensor B presionado) → Bajar (motores activos)
AL SOLTAR CUALQUIERA (dejar de intentar mover el brazo) → Parada inmediata
En resumen, ambos sensores de presión están situados por encima y por debajo del brazo de la persona que usa el brazo y detectan presión cuando se intentan realizar los movimientos asignados (intentar subir o bajar el brazo), por tanto, estas señales son procesadas en el HUB y siguiendo la programación activa los motores en las direcciones respectivas para que te ayuden a realizar estos movimientos.
🎯Uso previsto
- Exoesqueleto: apoyo en tareas diarias (alcance, sujeción, traslado corto de objetos) con control manual prioritario.
- Brazo robótico: actividades divulgativas/STEAM y pruebas de manipulación en entorno controlado.
ℹ️Aviso y limitaciones
- Proyecto educativo: no es un dispositivo médico ni un producto homologado.
- Requiere supervisión adulta y uso responsable (sin cargas elevadas ni contacto con líquidos, calor u objetos frágiles).
- Ajustar velocidad antes de cada sesión según el usuario y la tarea.
🚀Mejoras previstas
- Arnés y acolchados intercambiables para distintos perímetros.
- Reducción de peso mediante materiales más ligeros.
- Registro básico de telemetría (ciclos de agarre, paradas por bloqueo) para análisis didáctico.
🏷️Créditos y versión
Nombre del dispositivo: MANUBOT
Autoría: Equipo TechnoMakers
Versión: v1.1 — 23/03/2026
Download